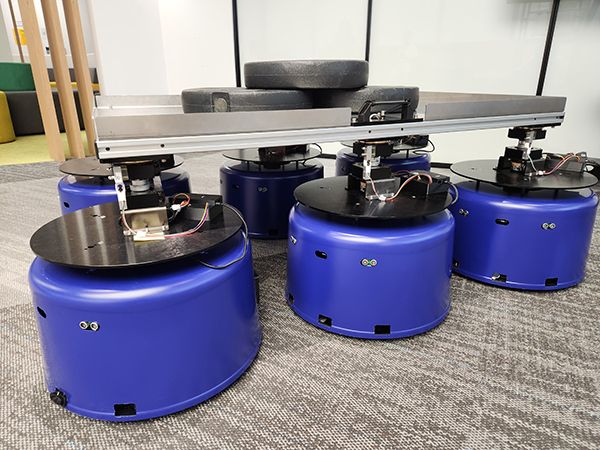
In the daily operations of the construction industry, the workers often face challenges during material transportation, such as space constraints, difficulty in transporting heavy building materials, and low flexibility of the equipment. Robotics technology is required to enhance efficiency and safety. Therefore, LSCM has developed the Multi-robot Collaborated Object Transportation System to help the construction industry overcome traditional problems in material transportation through innovative technology.
The system integrates different technologies, in a multi-robot collaborative setting, each robot uses LiDAR algorithms to observe its local surroundings in real time, enabling autonomous operation and load sharing. The number of collaborating robots can vary according to the weight of the materials being transported which provides higher flexibility. On the other hand, when operating individually, the robot’s compact modular design allows it to move flexibly in narrow spaces. Equipped with high-precision positioning technology, it ensures that materials are delivered to the designated locations accurately.
This system addresses the challenges of space constraints in construction sites and the varying weights of building materials by utilising small robots for collaboration. It helps the construction industry reduce the reliance on multiple types of transportation equipment, allowing the transportation of materials of different weights to be handled by just one type of robot. This reduces the need for equipment procurement, lowers maintenance costs, and minimises space usage. Additionally, the robots’ autonomous operation helps reduce manpower requirement while improving efficiency and safety. The system can also be utilised for other material transportation purposes.
The Multi-robot Collaborated Object Transportation System was awarded the Best Design Award in the Construction Robot Performance Competition at the Construction Robot and Exhibition 2025, gaining recognition from the industry. |